コマンドが見つかりません
Windowsユーザが古いPCをLinuxで使ってみるアレコレ
2017年5月5日金曜日
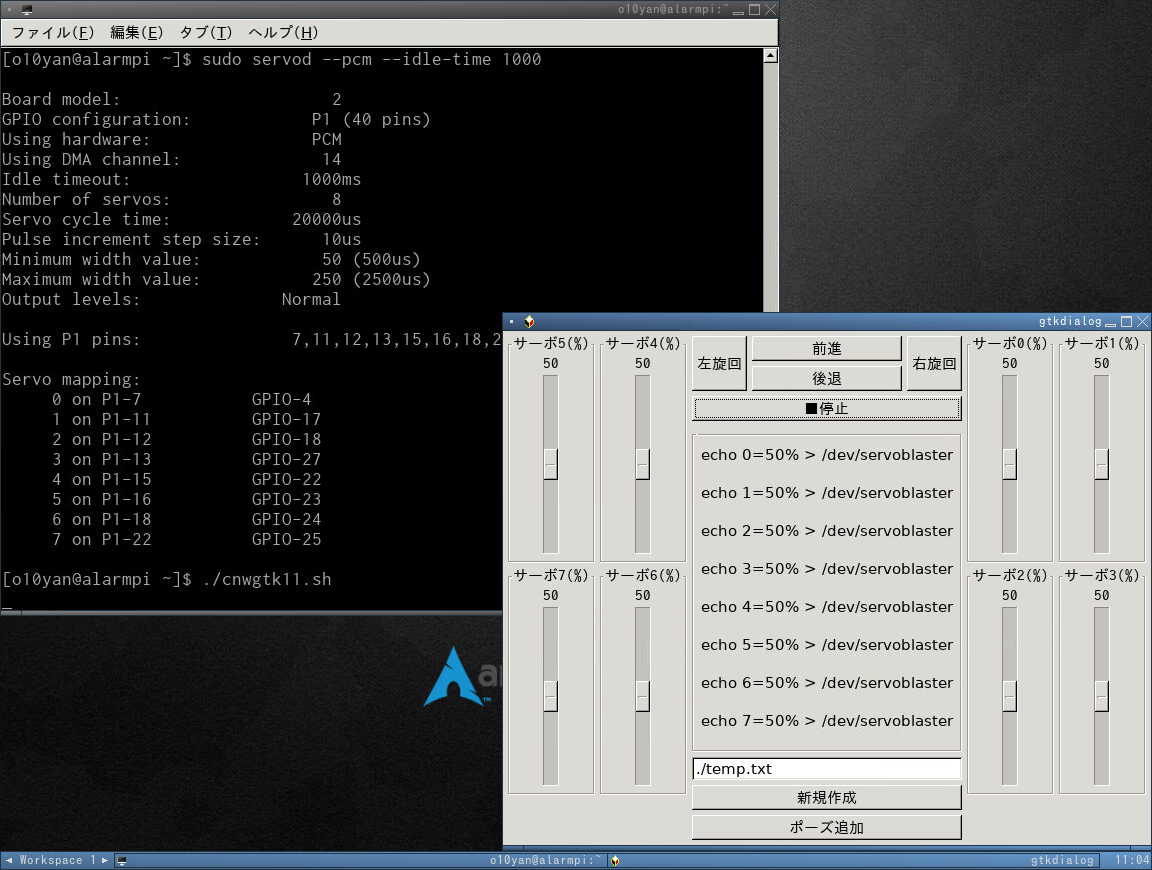
「簡易ポーズエディタ」 遂に、ボタンを使う
Raspberry Pi 2 Model B + ServoBlaster + シェルスクリプト(GtkDialog)で4足歩行ロボットを操作。
「簡易ポーズエディタ」の、今まで飾りになっていた上部のボタンに、機能を持たせた。
「左回転」「前進」「後退」「右回転」のボタンでそれぞれの動作を起動する。
(GtkDialogから、別のシェルスクリプトに書かれたfunction呼んでいるだけ)
ただし、「停止」ボタンを押さない限り、繰り返し回数上限まで動作を続行する。
ヘボいのは、上限に達して終了しても、操作ボタンがグレイアウトから復帰しない点。
「停止」ボタンを押さないと、復帰しない。
0 件のコメント :
コメントを投稿
次の投稿
前の投稿
ホーム
登録:
コメントの投稿 ( Atom )

0 件のコメント :
コメントを投稿